
Всеспрямований велосипед виготовлений на 3D-принтері
- 01 серпень 2025 15:56:00
- Переглядів: 494
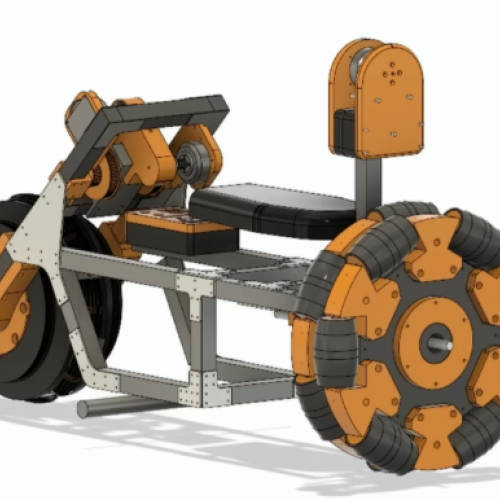
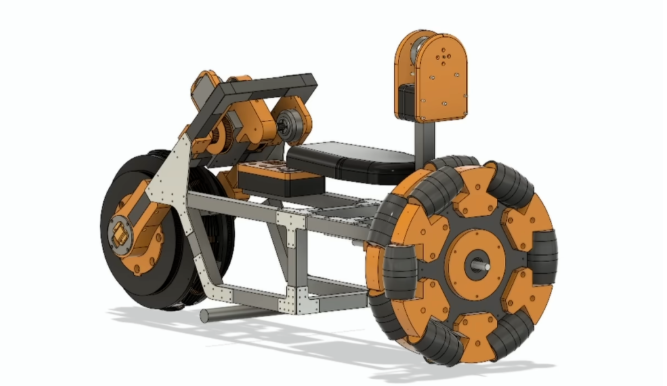
Джеймс Брутон, інженер та ютубер з Великої Британії, завершив створення всенаправленого велосипеда, використовуючи компоненти, надруковані на 3D-принтері, алюмінієвий екструзійний матеріал та систему самобалансування. Конструкція включає два всенаправлених колеса, встановлені під кутом 90 градусів одне до одного, що дозволяє транспортному засобу рухатися в будь-якому напрямку, включаючи прямо вбік. Брутон повторно використав переднє колесо від одноколісного балансувального робота, побудованого в квітні 2025 року, та заднє колесо від свого попереднього проєкту спідера 2023 року.
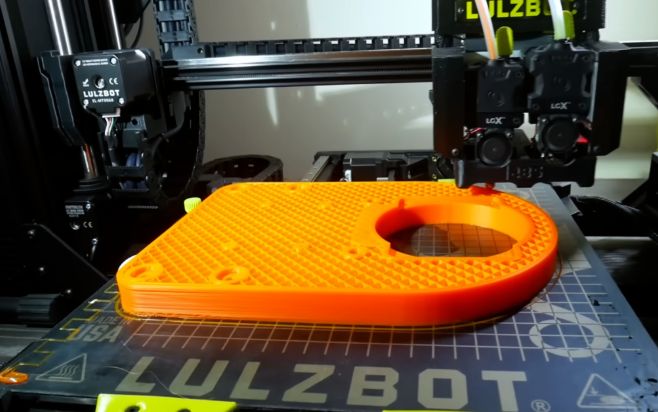
Шасі утворюється з Т-подібного екструзійного профілю з алюмінію 4040, з'єднаного похилими та прямими кронштейнами для кріплення повторно використаної вилки робота спереду та опори двигуна з ремінним приводом ззаду. Тримачі осей та шківи трансмісії були виготовлені за допомогою 3D-принтерів LulzBot, включаючи TAZ Workhorse та Mini 3. Bruton надрукував великі конструкційні компоненти з соплами 1,2 мм для швидшого складання. Для конструкційних деталей використовувався PLA PolyMax від Polymaker, тоді як нитка PolyLite Pro підтримувала корпус електроніки. Деталі задніх коліс були виготовлені з фанери через обмеження розміру платформи принтера.

Трансмісія включає двоступеневу систему ремінного редуктора. Перший ступінь забезпечує збільшення крутного моменту в співвідношенні 3:1 за допомогою проміжного шківа, а потім ремінь профілю HTD8 з'єднується з великим кінцевим шківом на задньому колесі. Система заднього приводу живиться від одного комплекту серводвигуна ODrive S1. ODrive, компанія, що спеціалізується на контролерах двигунів з відкритим кодом, постачає безщітковий двигун та вузол енкодера, здатний видавати потужність до 2 кВт. Натяг системи можна регулювати, ковзаючи кріплення двигуна вздовж екструзійної рами, закріплюючи його за допомогою кріпильних алюмінієвих пластин.
Контролер підтримує баланс, використовуючи дані з інерційного вимірювального блоку BNO086. Мікроконтролер Teensy 4 обробляє дані про крени та відповідно регулює крутний момент колеса. Панель керування містить кнопку аварійної зупинки та запуску, монітори напруги, регулятор диференту та рівень для орієнтації. Контактор на 500 ампер ізолює живлення двигуна. Дві пари літій-полімерних батарей 6S, з'єднаних послідовно, забезпечують 50 В для драйверів двигуна та 12 В для допоміжних систем.
Брутон замінив попередні системи введення з поворотним важелем двома тривісними джойстиками. Правий джойстик керує рухом вперед, назад і вбік. Лівий джойстик керує обертанням. Аналогові сигнали обробляються за допомогою згладжувального фільтра, який регулюється за допомогою ручки керування, що дозволяє поступове уповільнення при відпусканні джойстика. Брутон зауважив, що фільтр покращує якість їзди, пом'якшуючи різкі зміни вхідних даних.
Вхідні дані джойстика змінюють задане значення контролера, яке за замовчуванням дорівнює 0°, що відображає вертикальний баланс. Коригування цього заданого значення дозволяє велосипеду одночасно нахилятися та рухатися, подібно до того, як велосипедист нахиляється під час поворотів. Брутон точно налаштував параметри регулятора.
Початкові випробування показали, що заднє всенаправлене колесо може стабілізувати раму. Коли обидва колеса були активними, велосипед рухався у всіх напрямках. Однак, кермування виявило дисбаланс крутного моменту. Заднє колесо генерувало значно більшу обертальну силу, ніж менше переднє. Коли Брутон спробував обертатися на місці, шасі перехилилися під навантаженням, що призвело до надмірної корекції переднього колеса та дестабілізації рами. Щоб компенсувати це, він нахилився протилежно запланованому напрямку повороту, протидіючи крутному моменту шасі.
Щоб спростити керування, Брутон переналаштував мотоцикл для їзди заднім ходом. Він встановив інтерфейс джойстика ззаду та змінив розташування важелів керування. Тепер, коли його вага була розташована над більшим заднім колесом, перешкоди крутного моменту зменшилися, а реакція керма покращилася.
Незважаючи на механічний успіх, система має обмеження. Маленькі ролики на передньому колесі потребують високого струму — близько 20 ампер при 50 вольтах навіть без навантаження — що обмежує ефективність. Задній двигун забезпечує більший крутний момент, ніж може компенсувати передній, обмежуючи збалансоване обертання на вищих швидкостях. Брутон виявив, що їзда назад забезпечує кращий контроль, оскільки його центр мас збігається з потужнішим колесом.